GPO Algorithm¶
Introduction¶
Title: General parallel optimization a without metric
Authors: Xuedong Shang, Emilie Kaufmann, Michal Valko
Abstract: Hierarchical bandits are an approach for global optimization of emph{extremely} irregular functions. This paper provides new elements regarding POO, an adaptive meta-algorithm that does not require the knowledge of local smoothness of the target function. We first highlight the fact that the subroutine algorithm used in POO should have a small regret under the assumption of emph{local smoothness with respect to the chosen partitioning}, which is unknown if it is satisfied by the standard subroutine HOO. In this work, we establish such regret guarantee for HCT, which is another hierarchical optimistic optimization algorithm that needs to know the smoothness. This confirms the validity of POO. We show that POO can be used with HCT as a subroutine with a regret upper bound that matches the one of best-known algorithms using the knowledge of smoothness up to a log n factor. On top of that, we further propose a more general wrapper, called GPO, that can cope with algorithms that only have simple regret guarantees.
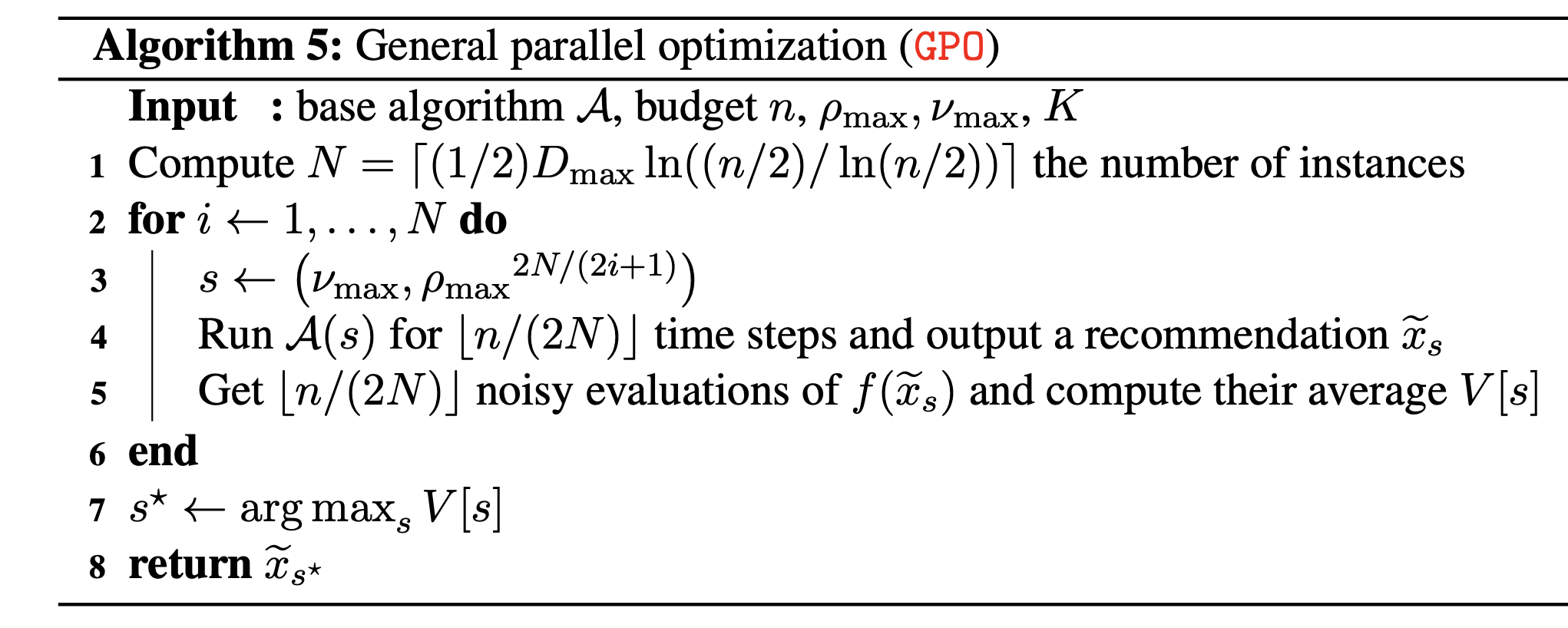
Algorithm Parameters¶
numax (float) – parameter nu_max in the algorithm
rhomax (float) – parameter rho_max in the algorithm, the maximum rho used
rounds (int) – the number of rounds/budget
domain (list(list)) – the domain of the objective function
partition – the partition used in the optimization process. Default: BinaryPartition
algo – the baseline algorithm used by the wrapper, such as T_HOO or HCT
Usage Example¶
Note
Make sure to use get_last_point() to get the final output
from PyXAB.synthetic_obj.Garland import Garland
from PyXAB.algos.GPO import GPO
from PyXAB.algos.HOO import T_HOO
domain = [[0, 1]] # Parameter is 1-D and between 0 and 1
target = Garland()
rounds = 1000
algo = GPO(rounds=rounds, domain=domain, algo=T_HOO)
for t in range(rounds):
point = algo.pull(t)
reward = target(point)
algo.receive_reward(t, reward)
algo.get_last_point()